
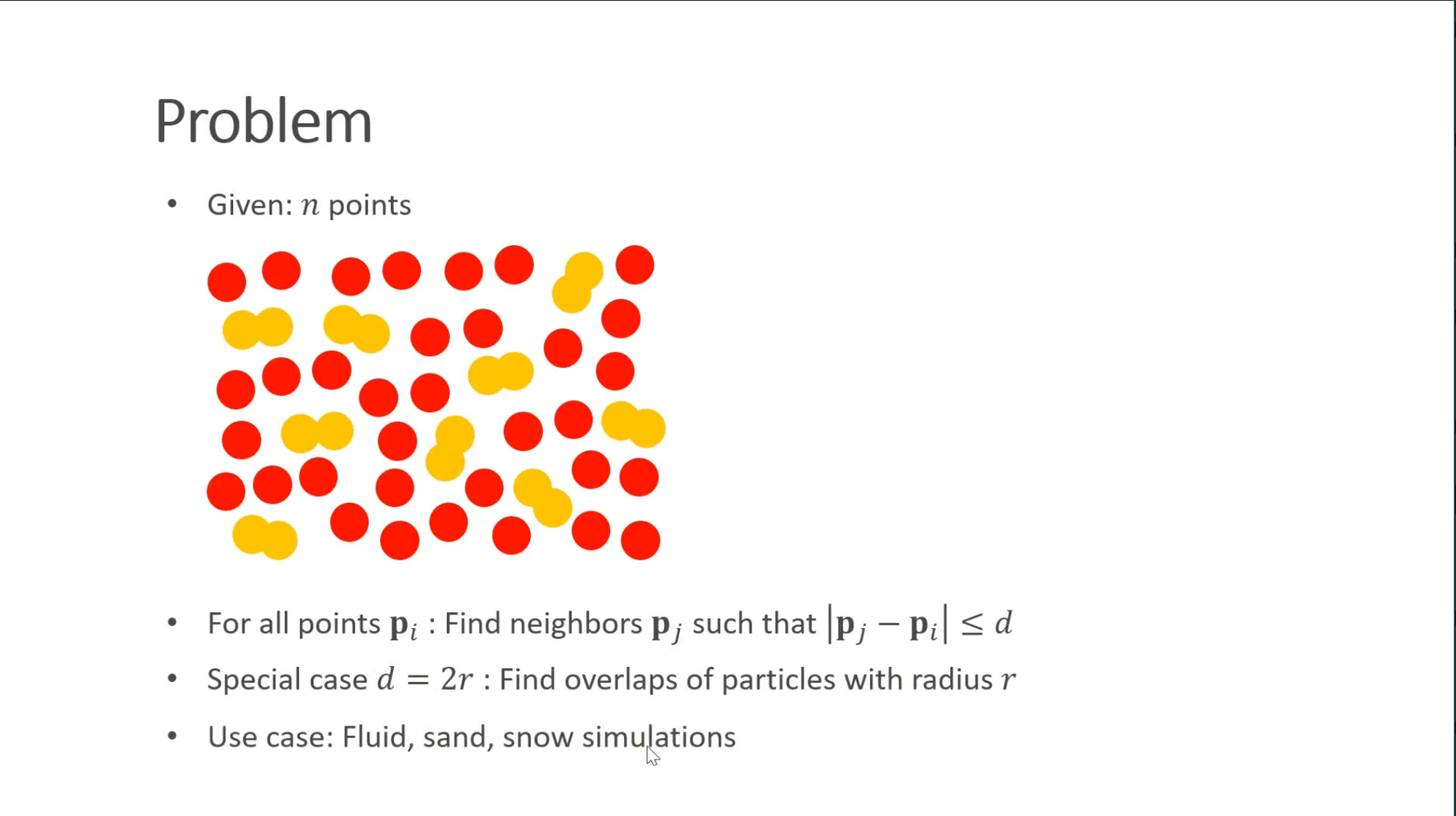
✨ How to find neighbors among thousands of particles in a blazing fast way
Coding
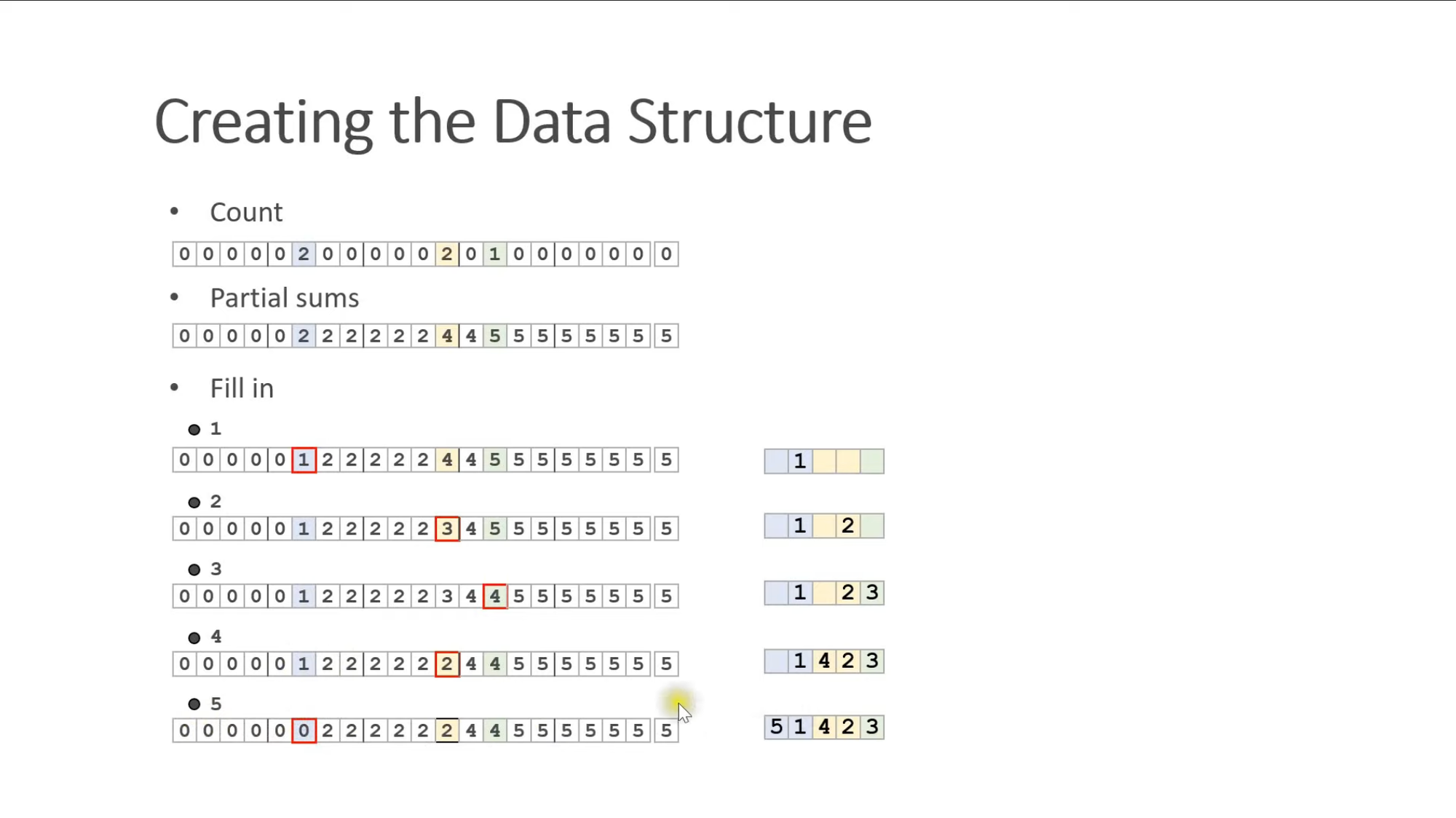
class Hash { constructor(spacing, maxNumObjects) { this.spacing = spacing; this.tableSize = 2 * maxNumObjects; this.cellStart = new Int32Array(this.tableSize + 1); this.cellEntries = new Int32Array(maxNumObjects); this.queryIds = new Int32Array(maxNumObjects); this.querySize = 0; this.maxNumObjects = maxNumObjects; this.firstAdjId = new Int32Array(maxNumObjects + 1); this.adjIds = new Int32Array(10 * maxNumObjects); } hashCoords(xi, yi, zi) { var h = (xi * 92837111) ^ (yi * 689287499) ^ (zi * 283923481); // fantasy function return Math.abs(h) % this.tableSize; } intCoord(coord) { return Math.floor(coord / this.spacing); } hashPos(pos, nr) { return this.hashCoords( this.intCoord(pos[3 * nr]), this.intCoord(pos[3 * nr + 1]), this.intCoord(pos[3 * nr + 2]) ); } create(pos) { var numObjects = Math.min(pos.length / 3, this.cellEntries.length); // determine cell sizes this.cellStart.fill(0); this.cellEntries.fill(0); for (var i = 0; i < numObjects; i++) { var h = this.hashPos(pos, i); this.cellStart[h]++; } // determine cells starts var start = 0; for (var i = 0; i < this.tableSize; i++) { start += this.cellStart[i]; this.cellStart[i] = start; } this.cellStart[this.tableSize] = start; // guard // fill in objects ids for (var i = 0; i < numObjects; i++) { var h = this.hashPos(pos, i); this.cellStart[h]--; this.cellEntries[this.cellStart[h]] = i; } } query(pos, nr, maxDist) { var x0 = this.intCoord(pos[3 * nr] - maxDist); var y0 = this.intCoord(pos[3 * nr + 1] - maxDist); var z0 = this.intCoord(pos[3 * nr + 2] - maxDist); var x1 = this.intCoord(pos[3 * nr] + maxDist); var y1 = this.intCoord(pos[3 * nr + 1] + maxDist); var z1 = this.intCoord(pos[3 * nr + 2] + maxDist); this.querySize = 0; for (var xi = x0; xi <= x1; xi++) { for (var yi = y0; yi <= y1; yi++) { for (var zi = z0; zi <= z1; zi++) { var h = this.hashCoords(xi, yi, zi); var start = this.cellStart[h]; var end = this.cellStart[h + 1]; for (var i = start; i < end; i++) { this.queryIds[this.querySize] = this.cellEntries[i]; this.querySize++; } } } } } queryAll(pos, maxDist) { var num = 0; var maxDist2 = maxDist * maxDist; for (var i = 0; i < this.maxNumObjects; i++) { var id0 = i; this.firstAdjId[id0] = num; this.query(pos, id0, maxDist); for (var j = 0; j < this.querySize; j++) { var id1 = this.queryIds[j]; if (id1 >= id0) continue; var dist2 = vecDistSquared(pos, id0, pos, id1); if (dist2 > maxDist2) continue; if (num >= this.adjIds.length) { var newIds = new Int32Array(2 * num); // dynamic array newIds.set(this.adjIds); this.adjIds = newIds; } this.adjIds[num++] = id1; } } this.firstAdjId[this.maxNumObjects] = num; } }
simulate(dt, gravity, worldBounds) { var minDist = 2.0 * this.radius; // integrate for (var i = 0; i < this.numBalls; i++) { vecAdd(this.vel, i, gravity, 0, dt); vecCopy(this.prevPos, i, this.pos, i); vecAdd(this.pos, i, this.vel, i, dt); } this.hash.create(this.pos); // handle collisions for (var i = 0; i < this.numBalls; i++) { this.visMesh.setColorAt(i, this.ballColor); // world collision for (var dim = 0; dim < 3; dim++) { var nr = 3 * i + dim; if (this.pos[nr] < worldBounds[dim] + this.radius) { this.pos[nr] = worldBounds[dim] + this.radius; this.vel[nr] = -this.vel[nr]; if (this.showCollisions) this.visMesh.setColorAt(i, this.ballCollisionColor); } else if (this.pos[nr] > worldBounds[dim + 3] - this.radius) { this.pos[nr] = worldBounds[dim + 3] - this.radius; this.vel[nr] = -this.vel[nr]; if (this.showCollisions) this.visMesh.setColorAt(i, this.ballCollisionColor); } } // interball collision this.hash.query(this.pos, i, 2.0 * this.radius); for (var nr = 0; nr < this.hash.querySize; nr++) { var j = this.hash.queryIds[nr]; vecSetDiff(this.normal, 0, this.pos, i, this.pos, j); var d2 = vecLengthSquared(this.normal, 0); // are the balls overlapping? if (d2 > 0.0 && d2 < minDist * minDist) { var d = Math.sqrt(d2); vecScale(this.normal, 0, 1.0 / d); // separate the balls var corr = (minDist - d) * 0.5; vecAdd(this.pos, i, this.normal, 0, corr); vecAdd(this.pos, j, this.normal, 0, -corr); // reflect velocities along normal var vi = vecDot(this.vel, i, this.normal, 0); var vj = vecDot(this.vel, j, this.normal, 0); vecAdd(this.vel, i, this.normal, 0, vj - vi); vecAdd(this.vel, j, this.normal, 0, vi - vj); if (this.showCollisions) this.visMesh.setColorAt(i, this.ballCollisionColor); } } } this.updateMesh(); }