Resources:
Part 2: The Core of PBD
In this section, we will
- present the basic idea and the simulation algorithm of PBD
- discuss how to solve the system of constraints that are described to be simulated
The simulated objects:
- a set of N particles
- a set of M constraints
- a stiffness parameter k∈[0,1]: the strength of the constraint
🌟 Time Algorithm
Algorithm 1 Position-based dynamics: Given this data and a time step Δt
1: for all vertices i do
2: initialise xi=xi0,vi=vi0,wi=1/mi
3: end for
4: loop
5: for all vertices i do vi←vi+Δtwifext(xi)
6: dampVelocities(v1,…,vN)
7: for all vertices i do pi←xi+Δtvi
8: for all vertices i do genCollConstraints(xi→pi)
9: loop solverIteration times
10: projectConstraints(C1,…,CM+Mcoll,p1,…,pN)
11: end loop
12: for all vertices i do
13: vi←(pi−xi)/Δt
14: xi←pi
15: end for
16: velocityUpdate(v1,…,vN)
17: end loop
(1) - (3) specify the positions and the velocities of the particles
(5) - (7) perform a simple symplectic Euler integration step on the velocities and positions, the new locations pi are used as predictions
(8) generate non-permanent external constraints, such as collision constraints
(9) - (11) iteratively corrects the predicted positions such that they satisfy the Mcoll external as well as the M internal constraints
(12) - (15) Use the corrected positions pi to update the velocities and positions
🌟 Solver
The system problem: a set of M equations for the 3N unknown position components, where M is the total number of constraints.
Solving a non-symmetric, non-linear system with equalities and inequalities is a tough problem.
Let x be the concatenation x=[x1T,…,xNT]T,
C1(x)≻0...CM(x)≻0
where the symbol ≻ denotes either = or ≥.
The Newton-Raphson iteration is a method to solve non-linear symmetric systems with equalities only. It starts with a first guess of a solution. Each constraint function is then linearized in the neighborhood of the current solution using
C(x+Δx)=C(x)+∇C(x)⋅Δx+O(∣Δx∣2)=0
This yields a linear system for the global correction vector Δx
∇C1(x)⋅Δx=−C1(x)...∇CM(x)⋅Δx=−CM(x)
where ∇Cj(x) is the 1×N dimensional vector containing the derivatives of the function Cj w.r.t. all its parameters, i.e. the N components of x. Both, the rows ∇Cj(x) and the right-hand side scalars −Cj(x) are constant as they are evaluated at the location x before the system is solved.
When M=3N and only equalities are present, the system can be solved by any linear solver, e.g., a preconditioned conjugate gradient method.
Non-linear Gauss-Seidel Solver : it solves each constraint equation C(x)≻0 separately
Given x , we want to find a correction Δx such that C(x+Δx)≻0. The constraint equation is approximated by
C(x+Δx)≈C(x)+∇C(x)⋅Δx≻0
Based on the linear and angular momentum conservation requirements, Δx is restricted in the direction of ∇C .
With a scalar Lagrange multiplier λ :
Δx=λM−1∇C(x)
where M=diag(m1,m2,…,mN) and wi=1/mi. The correction vector of a single particle i
Δxi=λwi∇xiC(x)
λ=∑jwj∣∇xjC(x)∣2C(x)
Formulated for the concatenated vector x of all positions, we get:
λ=∇C(x)TM−1∇C(x)C(x)
The Gauss-Seidel method
- stable and easy to implement
- converges significantly slower than global solvers. The main reason is that error corrections are propagated only locally from constraint to constraint.
Hierarchical Solver: increase the convergence rate of the Gauss-Seidel method
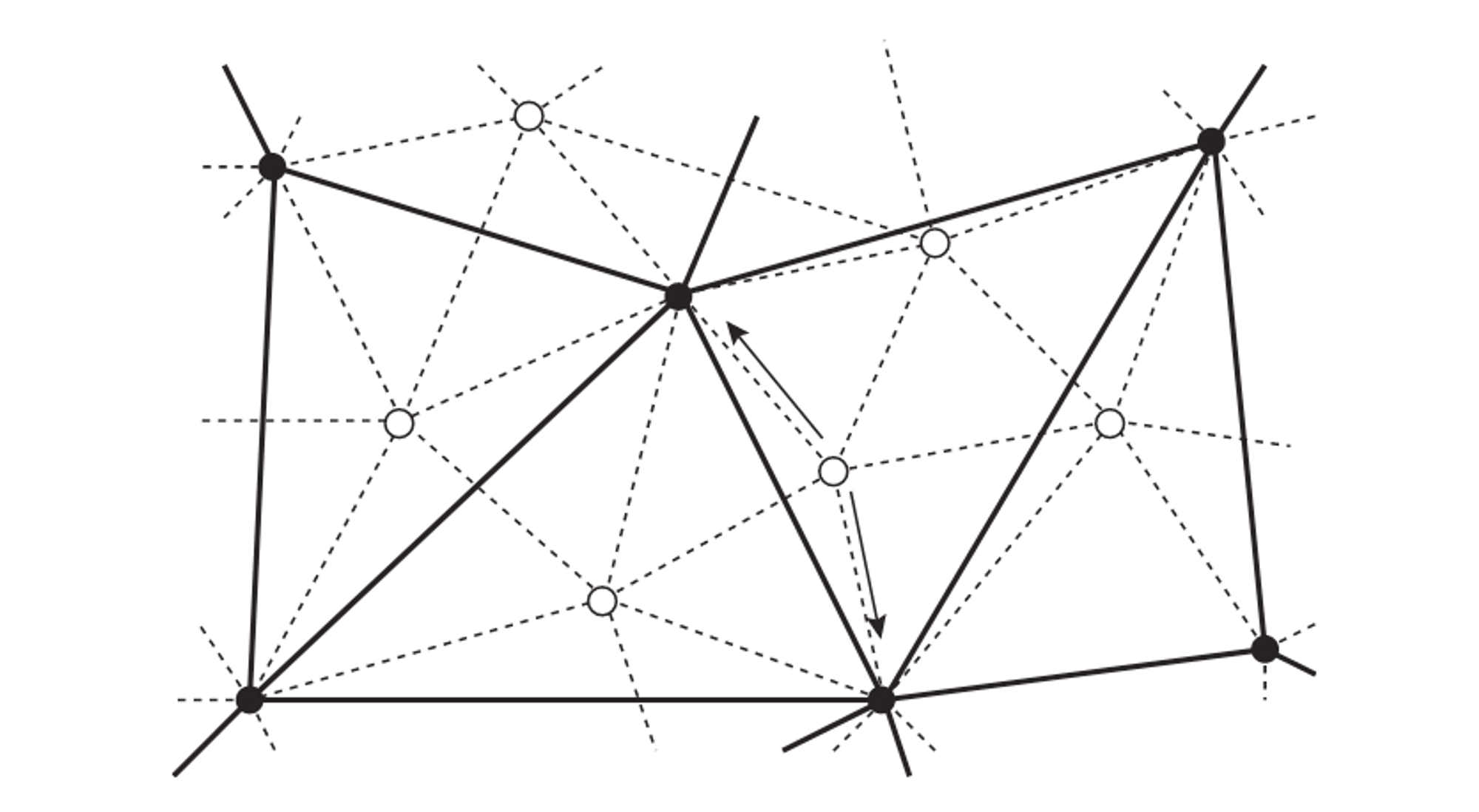
Figure 2: The construction of a mesh hierarchy: A fine level l is composed of all the particles shown and the dashed constraints. The next coarser level, l + 1, contains the proper subset of black particles and the solid constraints. Each fine white particle needs to be connected to at least k (=2) black particles – its parents – shown by the arrows.
The main idea is to create a hierarchy of meshes in which the coarse meshes make sure that error corrections propagate fast across the domain.
Hierarchical Position-Based Dynamics (HPBD):
- define the original simulation mesh to be the finest mesh of the hierarchy
- create coarser meshes by only keeping a subset of the particles of the previous mesh.
- The hierarchy is traversed only once from the coarsest to the finest level. Therefore, they only need to define a prolongation operator.
✨ Connection to Implicit Methods
By considering backward Euler as a constrained minimization over positions. Starting from the traditional implicit Euler time discretization of the equations of motion
xn+1vn+1=xn+Δtvn+1=vn+ΔtM−1(Fext+k∇Cn+1)
where C is the vector of constraint potentials; k is the stiffness. We can eliminate velocity to give:
M(xn+1−2xn+xn+1−Δt2M−1Fext)=Δt2k∇Cn+1
Equation (12) can be seen as the first-order optimality condition for the following minimization:
xmin21(xn+1−x~)TM(xn+1−x~)−Δt2kCn+1
where x~ is the predicted position, given by:
x~=2xn−xn−1+Δt2M−1Fext=xn+Δtvn+Δt2M−1Fext
Taking the limit as k→∞ we obtain the constrained minimization:
xmin21(xn+1−x~)TM(xn+1−x~)s.t.Ci(xn+1)=0,i=1,...,n.
We can interpret this minimization problem as finding the closest point on the constraint manifold to the predicted position.
To solve this minimization, PBD employs a variant of the fast projection algorithm but modifies the projection step by linearizing constraints one at a time using a Gauss-Seidel approach.
✨ Second Order Methods
the second-order accurate BDF update equations
xn+1vn+1=34xn−31xn−1+32Δtvn+1=34vn−31vn−1+32ΔtM−1(Fext+k∇Cn+1)
Eliminating velocity and re-arranging gives
M(xn+1−x~)=94Δt2k∇Cn+1
where the inertial position x~ is given by:
x~=34xn−31xn−1+98Δtvn−92Δtvn−1+94Δt2M−1Fext
Equation (19) can again be considered as the optimality condition for a minimization of the same form as (16).
Once the constraints have been solved, the updated velocity is obtained according to (17)
vn+1=Δt1[23xn+1−2xn+21xn−1]